
近日,美國研究者使用實驗室培育小鼠細胞制成的3D打印肌肉構造了生物機器人,此機器人由大鼠的脊柱提供動力。該系統有望協助生物疾病的修復,并用于假肢的制造。
生物機器人技術是用有生命的材料構成的,而不是用金屬材料構成的機器人。它們是利用自然界中的動物作為運動本體的機器人,通過把微電極植入與動物相關的腦核團或方向感受區,并施加人工模擬的神經電信號,從而達到控制運動的行為。
與傳統的仿生機器人相比,生物機器人在能源供給、運動靈活性、隱蔽性、機動性和適應性等方面具有明顯優勢。模仿生物體的動作方式已經成為一種被應用于仿生設備和機器的方法。比如,在進化算法的幫助下,佛蒙特大學(University of Vermont)與塔夫茨大學(Tufts University)的研究人員用非洲爪蟾的皮膚細胞和心臟細胞造出了一種名Xenobots的為新型“活體機器人”。
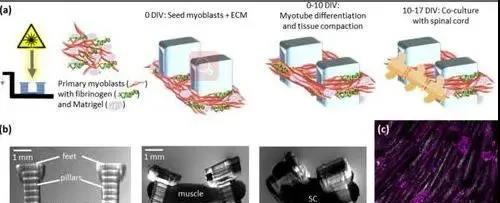
伊利諾伊大學厄巴納-香檳分校(UIUC)的Collin Kaufman及其同事,使用由實驗室培育的小鼠細胞制成的3D打印肌肉構造了生物機器人。3D打印肌肉本身并不能做很多事情,想要使用它們,則需要的是以某種方式控制它們。
研究人員沒有將這些3D打印肌肉連接到電子控制系統上,而是使用了大鼠脊柱中控制后腿的部分來操控肌肉。在脊椎動物中,復雜的運動任務主要由脊髓和腦干網絡控制。
以前在骨骼肌上的工作通常使用C2C12成肌細胞來研究體外的肌肉分化、力量產生和神經肌肉相互作用。當時一些工作完全通過外部控制機制,如外加電場、光遺傳學或化學刺激,繞過了運動神經元輸入到肌肉的過程。然而,神經元和肌肉在單一培養或一起培養時表現出不同的表現和行為。因此,為了建立神經肌肉接點(NMJ)的體外模型,對這些細胞進行共培養是很重要的,以使突發性組織和多細胞相互作用能夠在體外發生。
完整的大鼠脊髓從頭端到尾端具有三個不同的解剖區域:宮頸,胸廓和腰椎。腫大的腰椎腫大是尾椎脊髓的一個寬闊區域,是下肢神經的附著點。中樞模式發生器(CPG)是脊髓內復雜的振蕩網絡,控制著從運動到呼吸的一系列有節奏的動作。
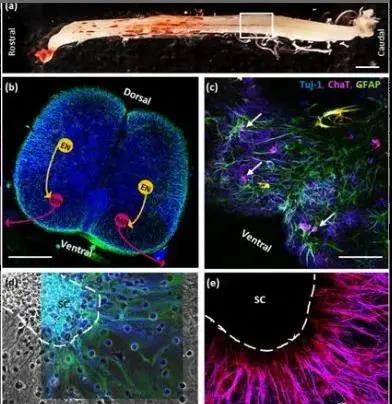
四足運動需要在肢體內以及同側和對側肢體之間同時協調屈伸肌對。這是由稱為CPG的脊髓回路完成的。CPG是一種大致對稱的回路,通常由外側興奮性中間神經元、內側抑制性中間神經元組成,輸出到腹外側膽堿能運動神經元組成。CPG的功能是從無模式的輸入中產生有模式的輸出。先前的工作已經確定了第一和第二腰椎作為大鼠后肢運動CPG的位置。
當研究者將大鼠脊柱與3D肌肉相連時,脊柱將神經元延伸到肌肉中,并開始通過肌肉發送電信號,使肌肉收縮。脊柱和肌肉被連接到一個靈活的支架上,支架的兩條手臂垂直于脊椎伸出,這樣當肌肉收縮時,支架就會彎曲,兩臂則指向彼此。
研究表明,使用生理上完整的脊髓驅動圖案化的肌肉收縮,可實現第一個全功能3D神經肌肉連接的工程設計。Kaufman說:“大鼠脊髓在離開身體一個多星期后,就能夠識別3D肌肉,并在體內完成肌肉有規律的收縮。肌肉的收縮可以通過在系統中添加或刪除神經遞質來控制。”
眾所周知,這些構成周圍神經系統的脊柱神經元很難在活體動物中進行研究。因此,關于此類神經元的疾病很難被理解,例如被稱為運動神經元疾病的肌萎縮性側索硬化癥(ALS)。Kaufman說,這樣的系統可以使實時研究這些疾病的進展變得更加容易。
這個機器人只有大約6毫米長,由于太小,肌肉很難將營養物質吸收到所有組織上,因此機器人的小體積也使這項研究成果的呈現面臨更大挑戰。但是,一旦研究人員開發出一種使此系統變大的方法,它們就可能用于其他醫學用途。
用大鼠的脊椎制造的機器人可以用于研究疾病在組織中的傳播過程,并最終可協助生物疾病的修復。Kaufman認為:“最終,這種模式可以用于假肢的使用,但這可能要用實驗室培養的人體組織,而不是老鼠的脊柱來完成。因為沒有人會想擁有可怕的老鼠脊柱手。”
結語:未來假肢有望受人體脊柱神經元控制
小鼠細胞制成的3D打印肌肉構造的生物機器人可依靠大鼠脊柱神經元進行控制,而此類系統有望應用于假肢制造。利用人類的脊柱神經元控制假肢成為可能。
消息來源:NewScientist
如有侵權,請及時聯系刪除

 13206432890
13206432890 高經理
高經理


