
來自莫納什大學和長安大學的科學家們建造了一種新穎的瀝青3D打印機,該打印機能夠自動檢測并填充人行道或道路上的裂縫。通過將攝像機安裝到定制的FDM 3D打印機上,并為其配備新穎的圖像處理算法,該團隊創建了具有獨立間隙密封功能的機器人。根據研究人員的說法,他們的自動化平臺現在可以為地方當局提供更快速的手段來修路,并保護人們免受基礎設施陳舊的隱患的侵害。

科學家的3D打印平臺能夠自動填充混凝土或瀝青中的空隙。圖片來自國際路面工程雜志。
徹底改變道路養護
裂縫最常發生在瀝青路面或道路網絡中,并且通常是由于日常事件(例如交通擁擠,人流量大和天氣變化)引起的。盡管這種損害在許多主要城市中仍然很普遍,但有可能導致更長時間的旅行延誤,甚至傷害那些不太注意的人。
資金拮據的政府寧愿使用裂縫密封膠進行人行道和道路維修,而不是更換不健全的基礎設施,但手動過程既費力又有潛在危險,使工人面臨交通壓力。結果,近來對替代品的研究開始了,正在開發各種由AI控制的平臺。
例如,加州大學戴維斯分校的一個團隊創建了兩種不同的仿生手臂安裝系統,但事實證明它們都與某些裂紋類型不兼容。由于環境的變化,其他類似的機器也容易抖動,從而使其不準確并容易泄漏。
相比之下,近來自動化3D打印技術已經取得了可觀的進步,這為正確修改的系統擔當了預先編程的建筑工人的可能性提供了可能性。為了檢驗這一理論,聯合研究團隊因此構建了獨特的3D打印機,無論附近發生什么,該打印機都能夠精確地進行沉積。
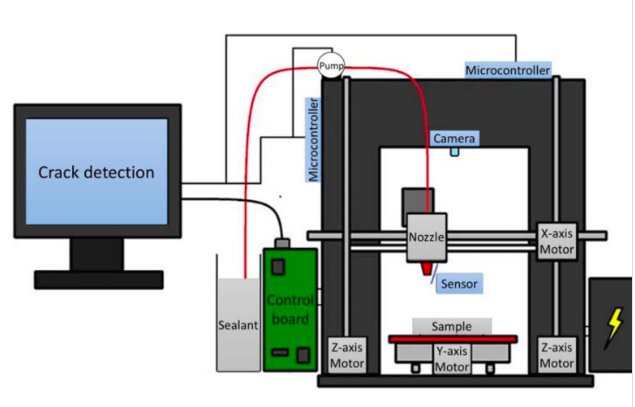
研究人員的新穎設置(如圖)使他們能夠修復一組混凝土板標本。圖片來自《國際路面工程雜志》。
建立一個攤鋪修復機器人
科學家們圍繞Prusa I3 3D打印機構建了他們新穎的平臺,該平臺具有升級的主板和已安裝的Arduino兼容模塊。一旦安裝了攝像頭,該系統就可以通過將捕獲的圖像通過微控制器發送到路徑規劃算法來工作,該算法可以獨立確定何時需要密封膠。
使用MATLAB軟件,該團隊還能夠配置單獨的圖像處理算法,以自動消除背景噪聲。實際上,該程序通過分割裂紋圖像的像素將裂紋圖像轉換為二進制形式,僅留下多余的黑色方塊和可識別的白色間隙,從而加快了機器的計算速度。
研究人員將他們快速的新平臺投入測試,然后嘗試修復一組水泥鋪路板實驗室標本。在運行過程中,該系統被證明能夠用冷的瀝青化合物精確填充簡單的縫隙,但是處理每個圖像卻花費了30秒,比一般的建筑工人要長得多。定制機器有時也會過滿,如果在最終使用場景中使用,可能會導致事故。結果,科學家們承認,將來可以使用深度學習方法進一步優化其原型算法,以產生一個具有現場現場測試功能的更快,更準確的平臺。
加載的瀝青3D打印機
盡管近年來已經開發了幾種不同的瀝青3D打印機,但沒有一種被證明足夠有效以保證其最終用途。
早在2015年,Advanced Paving Technologies便啟動了kickstarter,為其新型瀝青攤鋪機提供資金。該設備具有激光雷達3D掃描技術,該技術使其能夠比傳統的手動方法更快,更便宜,更整潔的方式在填充裂縫之前檢測道路上即將出現的裂縫。
最近,利茲大學的研究人員嘗試開發停機坪3D打印機器人,該機器人使用UGV捕獲的數據來識別坑洞,然后再進行查找和修復。將來,緊湊型平臺也可以安裝在無人機上,作為在高處固定難以接近的基礎設施的一種手段。
同樣,倫敦大學學院(UCL)的研究人員也創造了一種定制的瀝青3D打印機,該打印機專門設計用于修補坑洼。 使用他們的便攜式新平臺,該團隊已經能夠精確控制3D打印瀝青的參數,并優化整個擠出過程。
來源:中國3D打印網
如有侵權,請及時聯系刪除!

 13206432890
13206432890 高經理
高經理


