
蘇黎世聯邦理工學院的科學家開發了微型3D打印微型機器人,該微型機器人能夠通過人體血管傳遞藥物有效載荷。通過將軟光刻技術與電化學沉積技術相結合,該團隊得以制造出可通過磁場控制的多材料機器人。未來,科學家認為,他們的生物相容性微型機器人可以在外科手術過程中注入患者體內,并用于遠程治療疾病。
該論文的兩位主要作者之一卡洛斯·阿爾坎塔拉(CarlosAlcantara)表示:“金屬和聚合物具有不同的特性,兩種材料在制造微型機器方面都具有一定的優勢。我們的目標是將兩者結合起來,同時從所有這些特性中受益。”
多材料3D打印的復雜性
互鎖的機械結構已在宏觀機械和納米系統(例如分子穿梭機)中廣泛使用,但它們仍無法在微尺度上使用。盡管它們可能在軟機器人中應用,但它們傾向于通過有機合成進行鏈接,這阻止了它們與金屬材料的集成。
盡管軟光刻和微傳遞模塑方法在過去已顯示出希望,但用不同材料制成的互鎖零件仍然具有挑戰性。但是,考慮到帶有藥物輸送容器的可生物降解機器人的醫療潛力,該問題已成為添加劑研究的熱門話題。例如,牛津大學的科學家已經使用了折紙啟發的技術來制造具有形狀變形功能的微型機器人,但是它們也有局限性。機器人的材料之間的粘合水平仍然很差,并且發現該過程本身僅允許有限數量的幾何形狀。
為了完全實現多材料微縮印刷,蘇黎世團隊建議將不同的金屬和明膠“編織”在一起,以形成一個集成的微型機器人。通過調整此類網狀結構的圖案,科學家們還得出理論認為,可以對它們進行設計以使其具有某些特定于應用程序的特性。
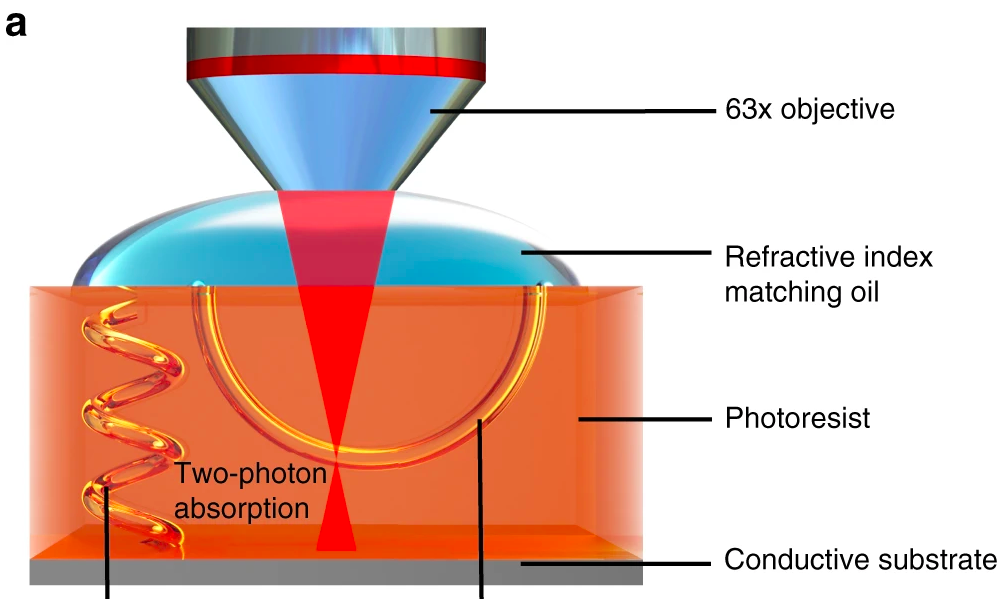
蘇黎世團隊部署了Nanoscribe 2PP系統,以3D打印他們每個不同的微型機器人迭代。圖片來自《自然通訊》雜志。
蘇黎世聯邦理工學院的新型微縮印刷方法
蘇黎世團隊設計了他們的微型機器人,以具有常用的金屬籠和螺旋形狀為特征,它們通過聚合物棒機械地互鎖。從理論上講,以這種方式構建微型設備可使籠子在內部自由旋轉,從而導致翻滾動作并最終導讓機器人運動。為了將他們的模型變成可以工作的原型,科學家們使用了Nanoscribe TPP系統來填充預制模具,然后用溶劑溶解模板。在此過程中,團隊發現他們能夠在一個步驟中3D打印兩種不同的幾何形狀,從而生產出一個互鎖的微型機器人。
進一步的測試表明,可以使用形狀記憶聚合物制造該設備,并加載有色染料,從而增強其藥物傳遞能力。據中國3D打印網了解,該團隊還能夠利用磁場抵抗各種摩擦力并使用不同的旋轉方式來操縱機器人。后來還設計了其他帶有PDMS親水框架的模型,使它們具有橡膠“船”的外觀。這些經過液體優化的裝置能夠克服很大的阻力來推動自身前進,從而滿足了血管擴張藥物輸送系統的另一個重要要求。
盡管團隊承認2PP仍然太慢而無法大規模生產其設備,但他們仍然認為他們的方法是成功的。通過進一步的研究,科學家們相信他們的機器人不僅可以用于藥物輸送目的,而且還可以用于實現諸如支架之類的手術工具。
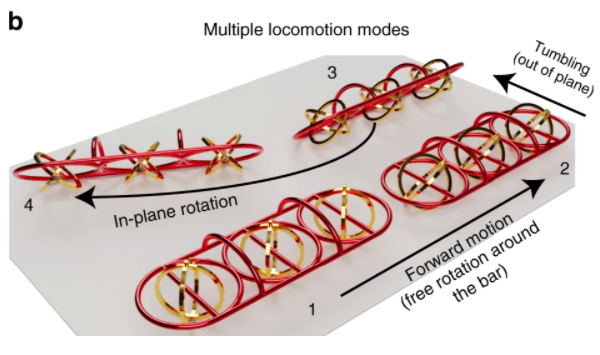
研究人員的微型機器人被證明具有多種不同的運動模式(如圖所示)。圖片來自《自然通訊》雜志。
微型機器人無止境的前進
近年來,2PP 3D打印提供的高水平精度使各種微型實驗機器人的生產成為可能,但它們的用途往往截然不同。格勒諾布爾大學的研究人員利用2PP和可定制的微珠來制造可磁控制的Millenium Falcon。通過改變單個磁珠的特性,該團隊還相信,有可能為軟機器人應用創建納米級微致動器。
同樣,普渡大學的一個團隊利用2PP來創建可區分的可跟蹤微型機器人。 通過圖案化設備并部署磁場,研究人員能夠從遠處監視和控制其進度。
Link?ping大學的一組科學家還開發了一套用于微微型機器人的微致動器,但改用擠壓3D打印。 這些設備是使用帶電的聚合物制造的,帶電的聚合物在打印后可能會變形,從而具有4D功能。
來源:中國3D打印網
如有侵權,請及時聯系刪除!

 13206432890
13206432890 高經理
高經理


